SF5181 ZKSDInterpolator
概述
本产品是一款高性能的运动控制工具,提供高效、精确的 XYZ 三轴连续插补和避障功能,旨在优化路径规划和提高运动控制的安全性。该库适用于多轴运动控制,尤其是在复杂环境中执行精密任务时,能够有效避免碰撞并确保最优路径。
库实现了从起始位置到目标位置的多段连续轨迹插补,支持设置每段插补的速度、加速度、减速度等参数。若未明确设置参数,则会使用默认值进行插补。提供了T形和S形加减速选项及灵活的过渡曲线类型,确保运动的平滑性与精确性。
避障功能适用于 XYZ 直角坐标系的机器人设备。障碍物的尺寸和位置通过虚拟障碍物模型定义,库支持设定安全边距和障碍物的上下表面高度,机器人根据设定的高度和距离调整 Z 轴运动,确保避免障碍物的干扰,安全到达目标位置。
下表概述了各个产品组件
| 产品组件 | 描述说明 |
|---|---|
| FB_InterpolatorXYZ | XYZ 三轴连续插补 |
| FB_PickBond | 避障功能 |
安装卸载
安装要求
本节描述工程和/或运行时系统所需的最低要求。
1、硬件要求
支持 MetaFacture 平台的设备( PLC 或嵌入式系统)。
2、软件要求
已安装 MetaFacture 的开发环境。
操作系统支持:MetaOS或其他兼容平台。
必须具备相关的库或模块依赖(如基础 I/O 库)
安装过程
根据 ZDSKInterpolator 版本和使用的操作系统,产品可以通过不同的方式安装,下面将详细介绍。
在 MetaFacture 中打开工程项目。
通过菜单选择“工具”->“库存储”。
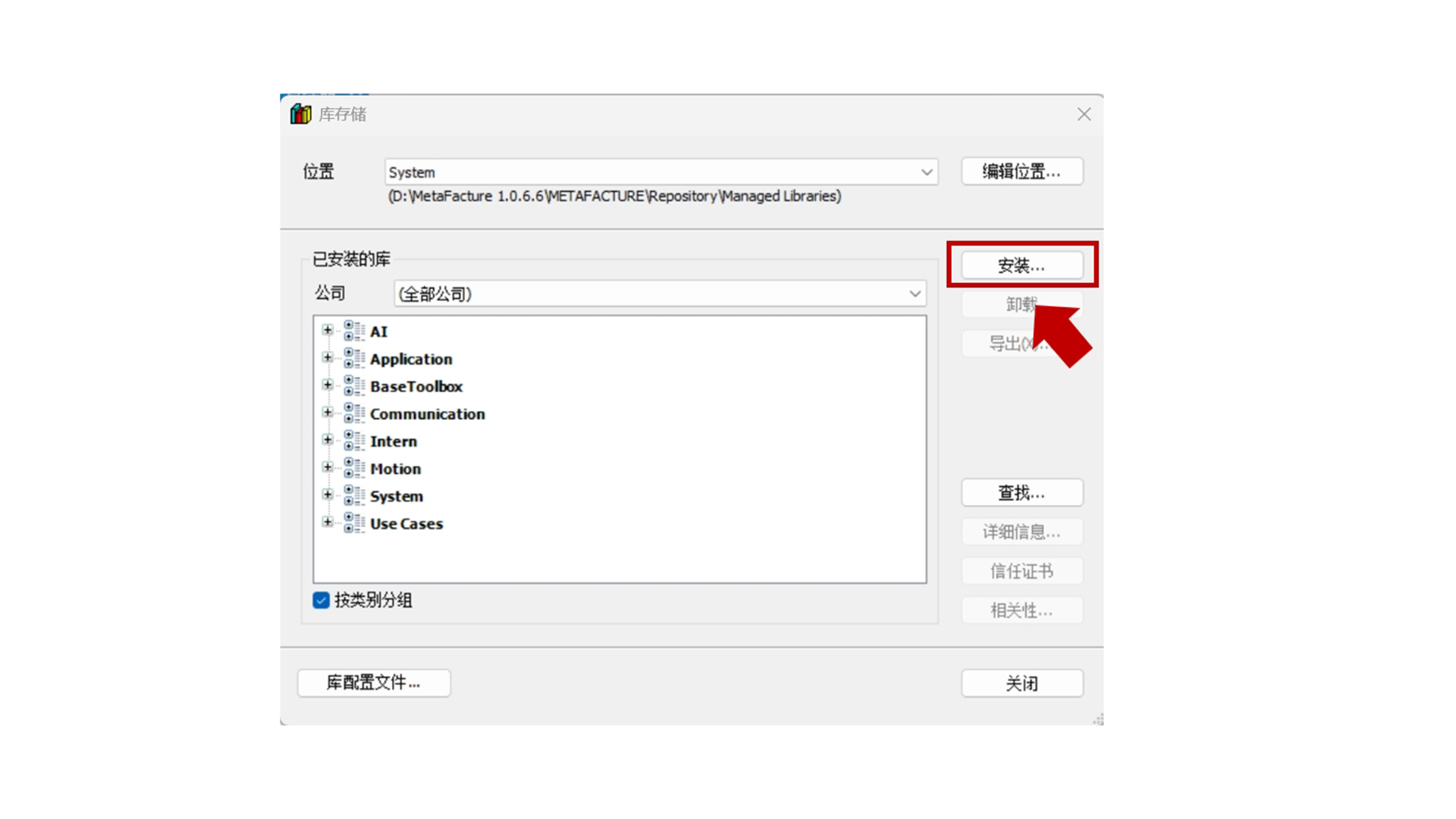
点击安装,打开 ZDSKInterpolator 库文件。
点击”添加库“
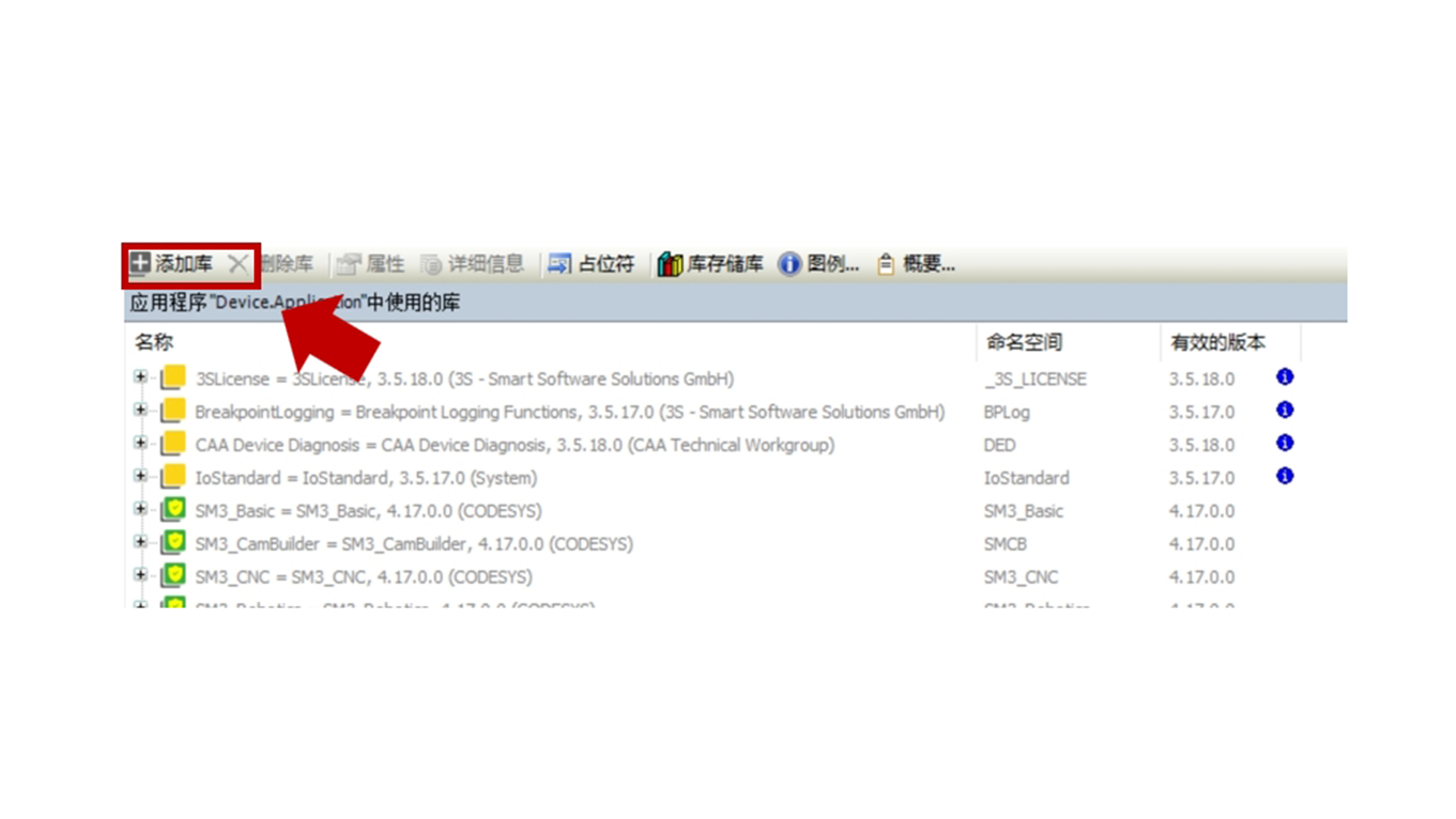
选中 ZDSKInterpolator ,点击确定。
更新安装
1、覆盖安装
下载最新版本的 ZDSKInterpolator 库文件。
打开 MetaFacture 工程,在“库管理器”中删除旧版本的库,导入新版本库文件。
保存工程并重新编译。
2、版本兼容性验证
检查新版本是否与现有工程兼容(例如检查参数和接口)。
根据文档调整旧版本与新版本可能的差异。
卸载过程
1、通过库管理器卸载
打开 MetaFacture 项目,进入“库管理器”。
选择 ZDSKInterpolator 库,点击“删除库”卸载库文件。
2、清理项目依赖
打开工程项目,检查并移除所有使用 ZDSKInterpolator 库的功能块或接口。
确保工程重新编译时无报错。
XYZ三轴连续插补功能
以功能块启动时的 X、Y,Z轴位置为起点,已知后续多段连续轨迹坐标,实现从起点到终点的三轴连续插补。
每段插补的速度,加速度,减速度,加加速度可以在指令结构体数组中单独设置,若不设置或输入0则采用默认参数结构体中对应的默认参数。
可选 T形/S 形加减速 ,及直线间的过渡曲线类型,可在默认参数结构体中设置相应的参数。
使用要求
| 开发环境 | 目标平台 | 需要包含的PLC 库 |
|---|---|---|
| MetaFacture | PC | ZKSDInterpolator |
避障功能
避障功能适用于XYZ直角坐标系机器人设备。
pickbond从pick点到bond点只允许单个长方体障碍物且长宽高与XYZ坐标轴平行。
pick点和bond点按照实际设备伺服读到的位置设置。
pickbond认为障碍物沿着X轴正方向和负方向都无限长,沿着Z轴负方向无限长,即Z轴值增大才能远离障碍物。
设置虚拟障碍物,两个角点位置,负角点3个坐标值必须分别小于正角点的3个坐标值,以确定障碍物位置和尺寸。
角点坐标值来自实际设备伺服读到的位置来比较,最小的值作为负角点,最大的值作为正角点。
障碍物的上表面高度设置必须高于起pick点和Bond点的高度Z。
障碍物要包裹住关键部分,如图。
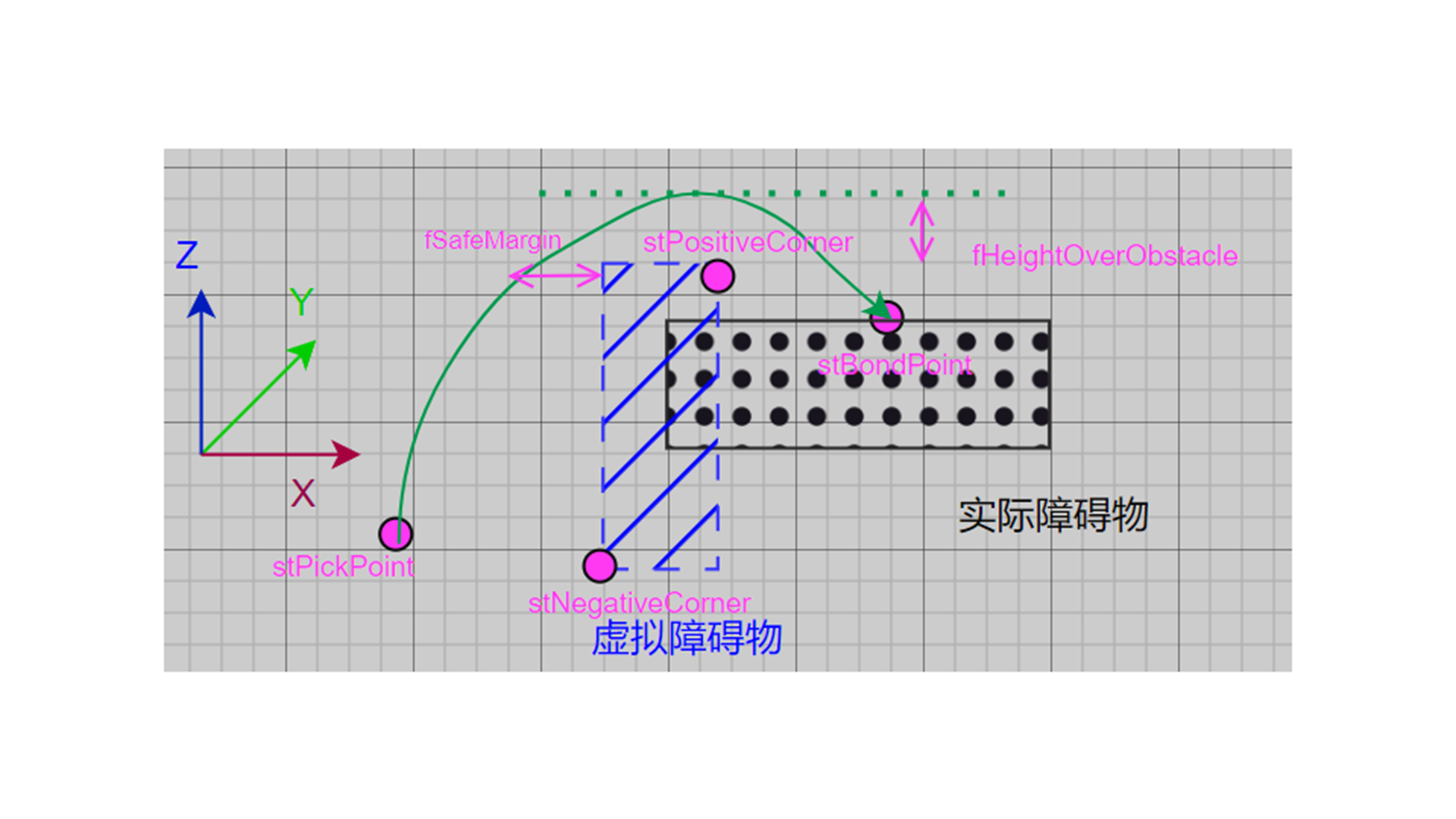
高度fHeightOverObstacle,指定Z轴超过障碍物上表面的高度,Z轴向上运动到此高度停止并反向运动。
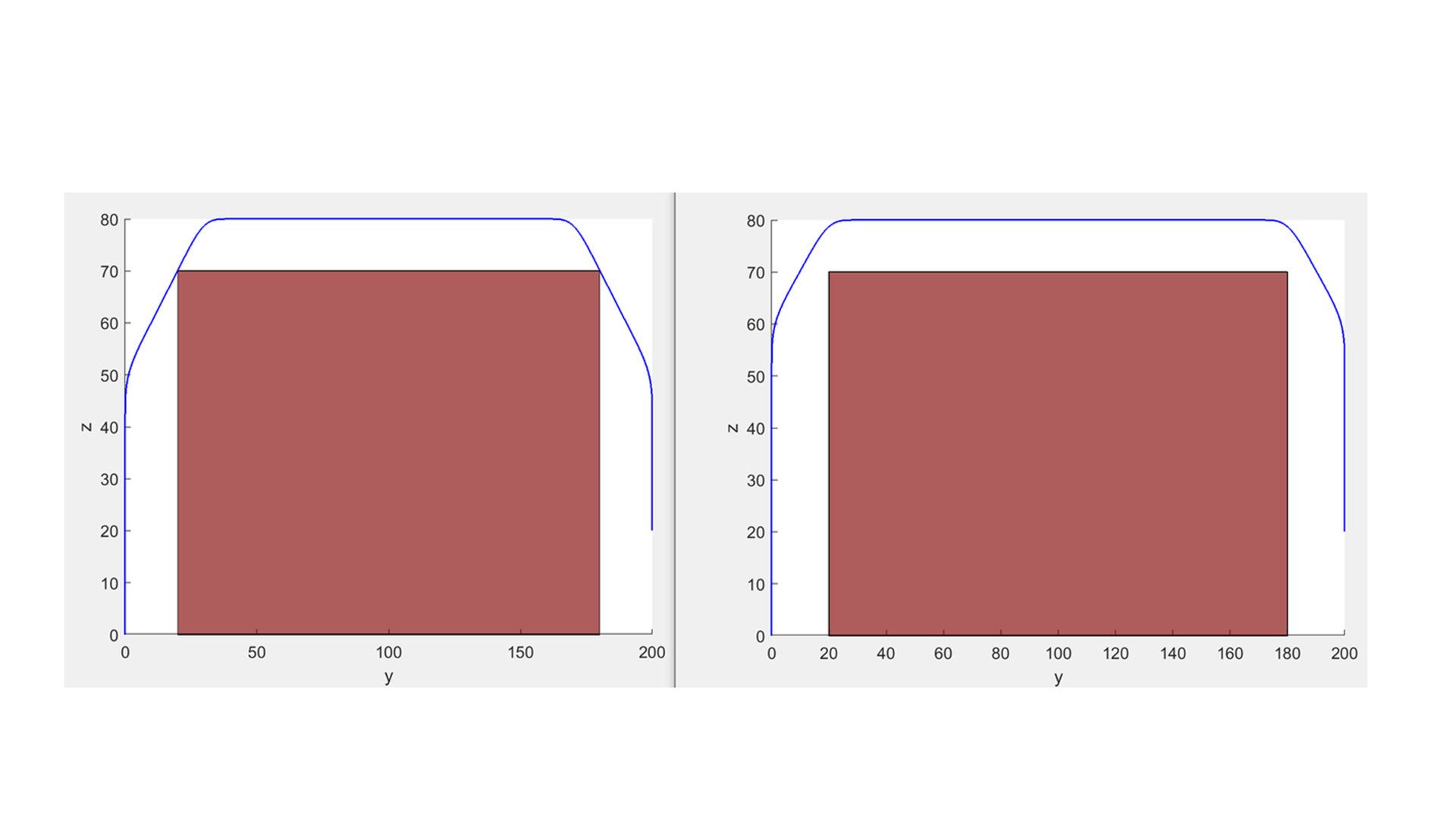
在其他条件允许时,最优时间路径会与障碍物边缘非常接近,示意图如下左图,变量safe_margin,作用是远离障碍物,示意图如下右图。
在pick点运动后,顶针轴和Z轴先同步运动一段很小的距离,同步运动结束后,Z轴位置不会超过障碍物上表面加fHeightOverObstacle。随后顶针轴减速到零,并回到设定的起始点。XYZ轴避开障碍物运动到Bond点。
使用要求
| 开发环境 | 目标平台 | 需要包含的PLC 库 |
|---|---|---|
| MetaFacture | PC | ZKSDInterpolator |
- SP7010工智机如何使用本地I/O?
- SP7010PING不通且工智机扫描不到怎么解决
- 如何查询SX51系列工智机的串口波特率?
- SX21系列工智机如何更新Bios
- 工程任务执行超时后,如何安全删除该工程?
- 工智机跨设备工程报错"设备版本不匹配"如何解决?
- 工智机通过指令安装deb组件方法
- PC如何连接到工智机?
- 工智机远程文件传输
- 工智机系统时间不正确
- 不使用RTE如何检查硬件串口?
- Modbus运行样例
- MetaOS一级虚拟化系统如何安装软件?
- 工智机如何远程打开GUI程序
- MetaOS一级虚拟化系统默认开机启动浏览器
- MetaFacture扫描不到工智机如何处理?
- 如何添加RTE外部库?
- MetaOS一层虚拟化下如何安装Firefox浏览器?
- socat串口网口透传工具介绍
- SX5/58系列工智机启动共享文件夹
- 外界触摸屏下,工智机如何关闭三指触控?
- 在Windows主机上使用Socat
- SX5系列工智机无法访问网口配置问题
- SX2系列工智机常见网络问题处理方法
- MetaOS一级虚拟化,文件系统损坏如何修复?
- 如何登录及查看工智机系统
- 如何修改系统语言
- 如何用命令行方式设置网口IP
- 如何查看PLC状态
- 如何设置系统时间、硬件时间
- 如何查看系统资源状态
- 如何查看系统日志
- 如何系统CPU分配
- 如何系统网口分配
- 如何系统刷写及备份操作手册
- 如何设定系统内存
- 如何用命令行方式设置网卡中断
- ISO镜像文件制作
- EcatPortSet网口中断设置,禁用IPv4,IPv6,缓冲区设置
- 排查磁盘空间满了系统文件占用情况
- 如何禁用超线程
- 如何修改UOS桌面中IP地址
- 如何关闭Windows自检?
- 带桌面的Linux系统如何通过手机共享WIFI上网?
- win10系统sinsegye用户密码永久设置?
- USB设备直通虚拟机
- 串口调试工具无权限问题
- Windows分区异常如何修复?
- 浏览器密钥环问题
- 开机意外进入应急模式如何解决?
- Gpart格式化硬盘操作手册
- 系统下时钟同步局域搭建操作步骤
- 系统下用户管理
- 大白菜如何重置windows密码?
- ADI更新如何删除旧的配置(虚拟机及数据库)