请输入
菜单
技术说明
功能块
FB_Scara_ZCcoupled
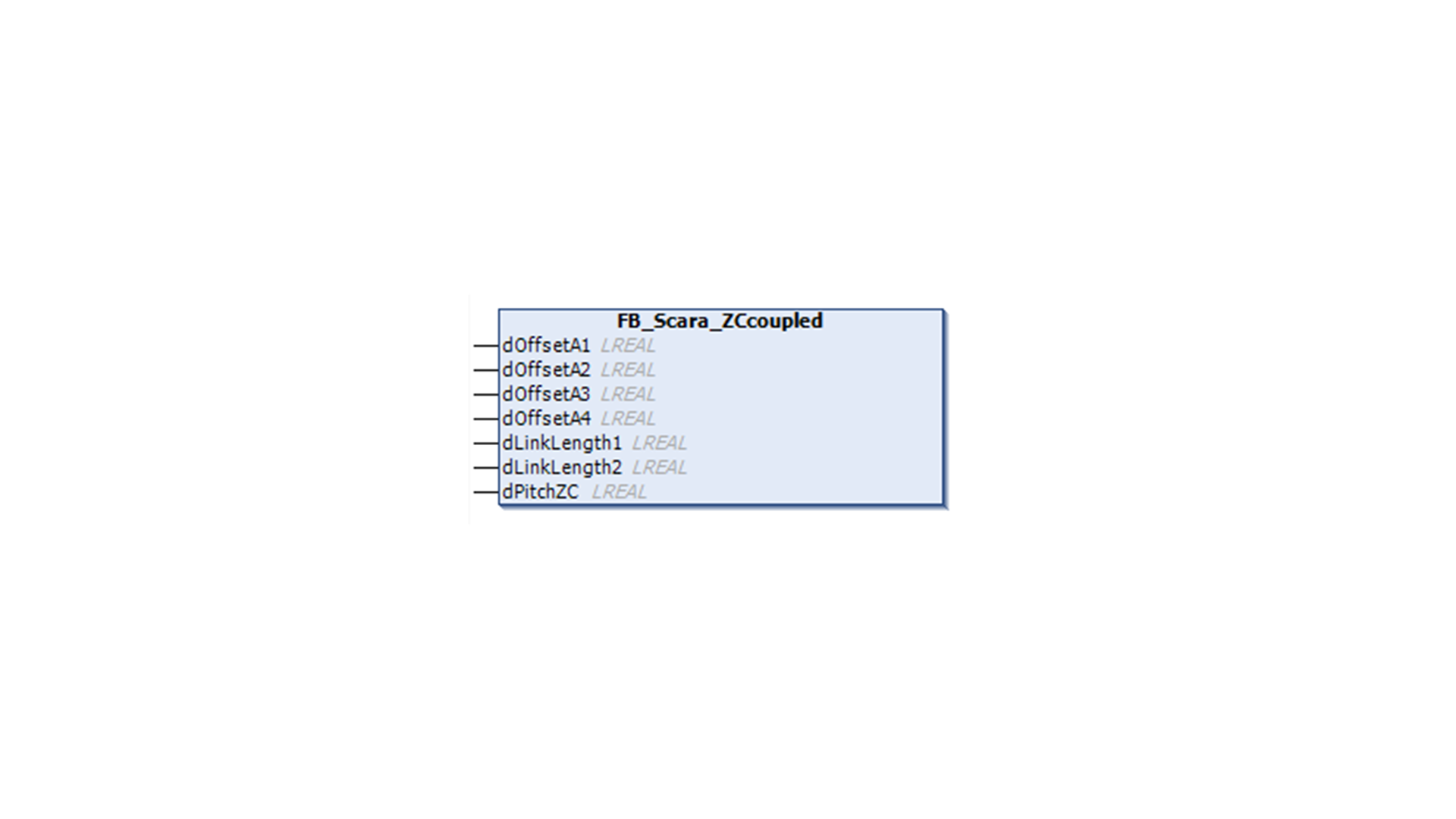
SCARA机器人运动学变换模块FB_Scara_ZCcoupled有多个输入,具体描述如下。
接口
VAR_INPUT
sql
VAR_INPUT
dOffsetA1 : LREAL;
dOffsetA2 : LREAL;
dOffsetA3 : LREAL;
dOffsetA4 : LREAL;
dLinkLength1 : LREAL;
dLinkLength2 : LREAL;
dPitchZC : LREAL;
END_VAR| 名称 | 类型 | 描述 |
|---|---|---|
| dOffsetA1 | LREAL | A1轴,运动学零位时关节旋转角度 |
| dOffsetA2 | LREAL | A2轴,运动学零位时关节旋转角度 |
| dOffsetA3 | LREAL | A3轴,运动学零位时关节移动距离 |
| dOffsetA4 | LREAL | A4轴,运动学零位时关节旋转角度 |
| dLinkLength1 | LREAL | 连杆参数1,关节1和关节2轴线的公垂线长度X |
| dLinkLength2 | LREAL | 连杆参数2,关节2和关节3轴线的公垂线长度X |
| dPitchZC | LREAL | 关节4正旋转360度,TCP向上移动的高度,若TCP实际向下运动则为负值 |
测试代码
以下示例代码用于 4D-SCARA 机器人的运动学变换测试。运行代码后,用户可以通过网页访问机器人测试的可视化界面,在虚拟环境中对轴运动进行测试和验证。
plain text
FUNCTION_BLOCK test_scara_with_axis
VAR_INPUT
robPower : BOOL;
robEnable : BOOL;
robReset : BOOL;
robToolSet : BOOL;
robWObjSet : BOOL;
END_VAR
VAR_OUTPUT
robState : DINT;
bPowerDone : BOOL;
END_VAR
VAR_IN_OUT
ToolOffset : MC_COORD_REF;
WobjOffset : MC_COORD_REF;
END_VAR
VAR
bRegulatorOn :BOOL :=FALSE;
bDriveStart :BOOL :=FALSE;
jogAxis : SMC_GroupJog2;
jogCartesian : SMC_GroupJog2;
moveAbsJ : MC_MoveDirectAbsolute;
moveJ : MC_MoveDirectAbsolute;
moveL : MC_MoveLinearAbsolute;
gStop : MC_GroupStop;
read_Axis_position : MC_GroupReadActualPosition;
read_Pose_position : MC_GroupReadActualPosition;
set_Tool : SMC_GroupSetTool;
gmcs : MC_SetCoordinateTransform ;
set_PathTolerance : SMC_GroupSetPathTolerance;
gPower : SMC_GroupPower ;
gEnable : MC_GroupEnable ;
gReadStatus : MC_GroupReadStatus ;
gReadError : MC_GroupReadError ;
gReset : MC_GroupReset ;
gSetTool : SMC_GroupSetTool ;
gSetWobj : MC_SetCoordinateTransform;
state : DINT;
statusText : STRING;
jogJointEnable: BOOL := FALSE;
jogCartEnable: BOOL := FALSE;
jogSpeedFactor: LREAL := 0.5;
jogForward : ARRAY[0..5] OF BOOL ;
jogBackward : ARRAY[0..5] OF BOOL ;
bJogAxisActive : BOOL;
bJogAxisBusy : BOOL;
bJogAxisError : BOOL;
bJogAxisErrorID : SMC_ERROR;
jogAxisPosition: SMC_POS_REF;
fbGroupSetPathTolerance : SMC_GroupSetPathTolerance;
iCoordSystem : UDINT := 0;
select_coord_system : SMC_COORD_SYSTEM;
jogCartesianForward : ARRAY[0..5] OF BOOL ;
jogCartesianBackward : ARRAY[0..5] OF BOOL ;
bJogCartesianActive : BOOL;
bJogCartesianBusy : BOOL;
bJogCartesianError : BOOL;
bJogCartesianErrorID : SMC_ERROR;
jogCartesianPosition: SMC_POS_REF;
moveAbsJ_Enable : BOOL := FALSE;
moveAbsJ_Target : SMC_POS_REF;
moveAbsJ_BufferMode: SM3_Robotics.MC_BUFFER_MODE;
moveAbsJ_TransitionMode: SM3_Robotics.MC_TRANSITION_MODE;
moveAbsJ_TransitioParameter: ARRAY [0..(SMC_RCNST.MAX_TRANS_PARAMS - 1)] OF LREAL;
moveAbsJ_Done: BOOL;
moveAbsJ_Busy: BOOL;
moveAbsJ_Active: BOOL;
moveAbsJ_CommandAborted: BOOL;
moveAbsJ_CommandAccepted: BOOL;
moveAbsJ_Error: BOOL;
moveAbsJ_ErrorID: SM3_Robotics.SMC_ERROR;
moveAbsJ_MovementId: SM3_Robotics.SMC_Movement_Id;
moveJ_Enable: BOOL := FALSE;
moveJ_Target: SM3_Robotics.SMC_POS_REF;
moveJ_Done: BOOL;
moveJ_Busy: BOOL;
moveJ_Active: BOOL;
moveJ_CommandAborted: BOOL;
moveJ_CommandAccepted: BOOL;
moveJ_Error: BOOL;
moveJ_ErrorID: SM3_Robotics.SMC_ERROR;
moveJ_MovementId: SM3_Robotics.SMC_Movement_Id;
moveL_Enable: BOOL := FALSE;
moveL_Target: SM3_Robotics.SMC_POS_REF;
moveL_Done: BOOL;
moveL_Busy: BOOL;
moveL_Active: BOOL;
moveL_CommandAborted: BOOL;
moveL_CommandAccepted: BOOL;
moveL_Error: BOOL;
moveL_ErrorID: SM3_Robotics.SMC_ERROR;
moveL_MovementId: SM3_Robotics.SMC_Movement_Id;
bStop : BOOL;
stop_Done: BOOL;
stop_Busy: BOOL;
stop_Active: BOOL;
stop_CommandAborted: BOOL;
stop_CommandAccepted: BOOL;
stop_Error: BOOL;
stop_ErrorID: SM3_Robotics.SMC_ERROR;
stop_MovementId: SM3_Robotics.SMC_Movement_Id;
read_Axis_position_enable: BOOL := TRUE;
read_Axis_position_Valid: BOOL;
read_Axis_position_Busy: BOOL;
read_Axis_position_Error: BOOL;
read_Axis_position_ErrorID: SM3_Robotics.SMC_ERROR;
read_Axis_position_Position: SM3_Robotics.SMC_POS_REF;
read_Actual_Axis_position_Position: SM3_Robotics.SMC_POS_REF;
read_Axis_position_KinematicConfig: SM3_Robotics.TRAFO.CONFIGDATA;
read_Pose_position_enable: BOOL := TRUE;
read_Pose_position_Valid: BOOL;
read_Pose_position_Busy: BOOL;
read_Pose_position_Error: BOOL;
read_Pose_position_ErrorID: SM3_Robotics.SMC_ERROR;
read_Pose_position_Position: SM3_Robotics.SMC_POS_REF;
read_Pose_position_KinematicConfig: SM3_Robotics.TRAFO.CONFIGDATA;
set_Tool_Excute: BOOL;
set_Tool_ToolOffset: SM3_Robotics.MC_COORD_REF;
set_Tool_Done: BOOL;
set_Tool_Error: BOOL;
set_Tool_ErrorID: SM3_Robotics.SMC_ERROR;
bGMCS : BOOL := FALSE;
gmcs_coord: SM3_Robotics.MC_COORD_REF;
set_PathTolerance_Execute: BOOL := FALSE;
PathTolerance_AxisLag: SM3_Robotics.TRAFO.AXISPOS_REF;
PathTolerance_MaxPositionLag: LREAL := 10000;
PathTolerance_MaxOrientationLag: LREAL := 10000;
PathTolerance_Done: BOOL;
PathTolerance_Error: BOOL;
PathTolerance_ErrorID: SM3_Robotics.SMC_ERROR;
axispos : TRAFO.AXISPOS_REF;
robStatus: DINT;
bPower : BOOL := FALSE;
bEnable : BOOL := FALSE;
bReset : BOOL := FALSE;
bToolSet : BOOL := FALSE;
bWobjSet : BOOL := FALSE;
ToolOffset1 : MC_COORD_REF;
WobjOffset1 : MC_COORD_REF;
config1_enable :BOOL :=FALSE;
config2_enable :BOOL :=FALSE;
xElbowRight :BOOL :=FALSE;
config_to_set : TRAFO.Kin_Scara3_Z_Config;
config_read: TRAFO.Kin_Scara3_Z_ReadConfig;
skc: SMC_SetKinConfiguration;
skc_execure :BOOL :=FALSE;
nP1 :DINT:=1; nP2 :DINT:=1; nP3 :DINT:=1; nP4 :DINT:=1;
setConfig : SMC_SetKinConfiguration;
setConfig_Execute :BOOL :=FALSE;
Scara3ZConfig : TRAFO.Kin_Scara3_Z_Config;
periodConfig :SM3_Robotics.TRAFO.CONFIGDATA ;
END_VAR
bRegulatorOn := TRUE; bDriveStart := TRUE;
bPower:= robPower; bEnable:= robEnable;
gPower(AxisGroup:= scara,bRegulatorOn:= bRegulatorOn,bDriveStart:= bDriveStart,Status=>,Busy=>,Error=>,ErrorID=>) ;
gEnable(AxisGroup:= scara,Done=>,Busy=>,Error=>,ErrorID=>) ;
CASE state OF
0:
gPower.Enable := bPower;
IF gPower.Status THEN
state := state + 10;
ELSE
state := 0;
RETURN;
END_IF
10:
gEnable.Execute := bEnable;
IF gEnable.Done THEN
state := state + 10;
END_IF
20:
gReadStatus(AxisGroup:= scara);
gReadError(AxisGroup:= scara);
gSetTool(AxisGroup:= scara);
gSetWobj(AxisGroup:= scara);
gReset(AxisGroup := scara);
IF gPower.Status AND gEnable.Done THEN
gReadStatus.Enable :=TRUE;
gReadError.Enable := TRUE;
state := state + 10;
END_IF
END_CASE
IF robReset THEN
gReset(AxisGroup := scara, Execute:=robReset, Done=>,Busy=>,Error=>,ErrorID=>);
END_IF
IF state = 30 THEN
bPowerDone := TRUE;
ELSE
bPowerDone := FALSE;
END_IF
robStatus := state;
robState := robStatus;
IF robState <> 30 THEN
RETURN;
END_IF
// >>>> robStatus
IF gReadStatus.GroupErrorStop THEN
statusText :=CONCAT('Error : ',SMC_ErrorString(gReadError.GroupErrorID, SMC_LANGUAGE_TYPE.english));
ELSE
statusText := 'No Error';
END_IF
jogAxis(
AxisGroup:= scara,
Enable:= jogJointEnable, Forward:= jogForward, Backward:= jogBackward,
MaxLinearDistance:= 100, MaxAngularDistance:= 100,
Velocity:= 1, Acceleration:= 10, Deceleration:= 10, Jerk:= 100,
VelFactor:= jogSpeedFactor, AccFactor:= 1, JerkFactor:= 1, TorqueFactor:= 1,
CoordSystem:= SMC_COORD_SYSTEM.ACS, ABC_as_ACS:= FALSE,
Active=> bJogAxisActive, Busy=> bJogAxisBusy,
Error=> bJogAxisError, ErrorID=> bJogAxisErrorID, CurrentPosition=> jogAxisPosition);
jogCartesian(
AxisGroup := scara,
Enable := jogCartEnable, Forward := jogCartesianForward, Backward := jogCartesianBackward,
MaxLinearDistance := 20, MaxAngularDistance := 20,
Velocity := 1, Acceleration := 10, Deceleration := 10, Jerk := 100,
VelFactor := jogSpeedFactor, AccFactor:= 1, JerkFactor:= 1, TorqueFactor:= 1,
CoordSystem := SMC_COORD_SYSTEM.MCS, ABC_as_ACS := FALSE,
Active => bJogCartesianActive, Busy => bJogCartesianBusy,
Error => bJogCartesianError, ErrorID => bJogCartesianErrorID, CurrentPosition=> jogCartesianPosition);
IF TRUE THEN
read_Axis_position(
AxisGroup:= scara, Enable:= read_Axis_position_enable,
CoordSystem:= SMC_COORD_SYSTEM.ACS,
Valid=> read_Axis_position_Valid, Busy=> read_Axis_position_Busy,
Error=> read_Axis_position_Error, ErrorID=> read_Axis_position_ErrorID,
Position=> read_Axis_position_Position, KinematicConfig=> read_Axis_position_KinematicConfig);
END_IF
select_coord_system := SMC_COORD_SYSTEM.MCS ;
IF TRUE THEN
read_Pose_position(
AxisGroup:= scara,
Enable:= read_Pose_position_enable, CoordSystem:= select_coord_system,
Valid=> read_Pose_position_Valid, Busy=> read_Pose_position_Busy,
Error=> read_Pose_position_Error, ErrorID=> read_Pose_position_ErrorID,
Position=> read_Pose_position_Position, KinematicConfig=> read_Pose_position_KinematicConfig);
config_to_set(xElbowRight := xElbowRight, nPeriodA1:=nP1, nPeriodA2:=nP2, nPeriodA3:=nP3, Config=>periodConfig);
IF config1_enable THEN
skc(AxisGroup := scara, Execute := skc_execure, ConfigData := periodConfig, Done =>, Busy =>, Error =>, ErrorId=>);
END_IF
IF config2_enable AND read_Pose_position.Valid THEN
setConfig(AxisGroup:= scara, Execute:= setConfig_Execute, ConfigData:= read_Pose_position_KinematicConfig,
Done=>, Busy=>, Error=>, ErrorID=>);
IF setConfig.Done THEN
setConfig_Execute := FALSE ;
ELSIF setConfig.Error THEN
setConfig_Execute := FALSE ;
END_IF
END_IF
END_IF
CASE iCoordSystem OF
0:
select_coord_system := SMC_COORD_SYSTEM.MCS ;
1:
select_coord_system := SMC_COORD_SYSTEM.PCS_1;
ELSE
select_coord_system := SMC_COORD_SYSTEM.MCS ;
END_CASE
axispos.a0 := 100000000; axispos.a1 := 100000000; axispos.a2 := 100000000;
axispos.a3 := 100000000; axispos.a4 := 100000000; axispos.a5 := 100000000;
fbGroupSetPathTolerance(
AxisGroup := scara,
Execute := set_PathTolerance_Execute,
MaxPositionLag := 1000000,
MaxOrientationLag := 360000,
MaxAxisLag := axispos
);
moveAbsJ(
AxisGroup:= scara,
Execute:= moveAbsJ_Enable,
Position:= moveAbsJ_Target, MovementType:= ,
CoordSystem:= SMC_COORD_SYSTEM.ACS,
BufferMode:= SM3_Robotics.MC_BUFFER_MODE.Aborting,
TransitionMode:= SM3_Robotics.MC_TRANSITION_MODE.TMNone,
TransitionParameter:= moveAbsJ_TransitioParameter,
VelFactor:= 1, AccFactor:= 1, JerkFactor:= 1, TorqueFactor:= 1,
Done=> moveAbsJ_Done, Busy=> moveAbsJ_Busy, Active=> moveAbsJ_Active,
CommandAborted=> moveAbsJ_CommandAborted, CommandAccepted=> moveAbsJ_CommandAccepted,
Error=> moveAbsJ_Error, ErrorID=> moveAbsJ_ErrorID,
MovementId=>moveAbsJ_MovementId);
moveJ(
AxisGroup:= scara,
Execute:= moveJ_Enable, Position:= moveJ_Target, MovementType:= ,
CoordSystem:= SMC_COORD_SYSTEM.PCS_1,
BufferMode:= SM3_Robotics.MC_BUFFER_MODE.Aborting,
TransitionMode:= SM3_Robotics.MC_TRANSITION_MODE.TMNone,
TransitionParameter:= moveAbsJ_TransitioParameter,
VelFactor:= 1, AccFactor:= 1, JerkFactor:= 1, TorqueFactor:= 1,
Done=> moveJ_Done, Busy=> moveJ_Busy, Active=> moveJ_Active,
CommandAborted=> moveJ_CommandAborted, CommandAccepted=> moveJ_CommandAccepted,
Error=> moveJ_Error, ErrorID=> moveJ_ErrorID, MovementId=> moveJ_MovementId);
moveL(
AxisGroup:= scara, Execute:= moveL_Enable, Position:= moveL_Target,
Velocity:= 100, Acceleration:= 1000, Deceleration:= 1000, Jerk:= 1000,
CoordSystem:= SMC_COORD_SYSTEM.MCS,
BufferMode:= SM3_Robotics.MC_BUFFER_MODE.Aborting,
TransitionMode:= SM3_Robotics.MC_TRANSITION_MODE.TMNone,
TransitionParameter:= moveAbsJ_TransitioParameter,
OrientationMode:= SMC_ORIENTATION_MODE.GreatCircle,
VelFactor:= 1, AccFactor:= 1, JerkFactor:= 1, TorqueFactor:= 1,
Done=> moveL_Done, Busy=> moveL_Busy, Active=> moveL_Active,
CommandAborted=> moveL_CommandAborted, CommandAccepted=> moveL_CommandAccepted,
Error=> moveL_Error, ErrorID=> moveL_ErrorID, MovementId=> moveL_MovementId);
gStop(
AxisGroup:= scara,
Execute:= bStop,
Deceleration:= 1000, Jerk:= 1000, AccFactor:= 1, JerkFactor:= 1, TorqueFactor:= 1,
ClearMovements:=TRUE,
Done=> stop_Done, Busy=> stop_Busy, Active=> stop_Active,
CommandAborted=> stop_CommandAborted, CommandAccepted=> stop_CommandAccepted,
Error=> stop_Error, ErrorID=> stop_ErrorID, MovementId=> stop_MovementId);最近修改: 2025-04-28